

ປະຕູຕ້ານການລັກຂະໂມຍການກົດດັນໄຮໂດຼລິກ


ກໍລະນີຂອງບໍລິສັດ
ຄໍາຮ້ອງສະຫມັກ
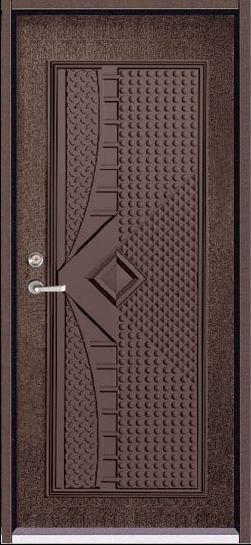
ເຄື່ອງນີ້ສ່ວນໃຫຍ່ແມ່ນເຫມາະສົມສໍາລັບປະຕູໂລຫະ. ອຸປະກອນດັ່ງກ່າວມີຄວາມເຄັ່ງຄັດຂອງລະບົບທີ່ດີແລະມີຄວາມແມ່ນຍໍາສູງ, ມີຊີວິດສູງແລະຄວາມຫນ້າເຊື່ອຖືສູງ. ຂະບວນການ embossing ສໍາລັບພາກສ່ວນໂລຫະທີ່ໄດ້ພົບກັບການຜະລິດ 3 ແບບ / ການຜະລິດໃນມື້ ..
ພາລາມິເຕີເຄື່ອງ
| ຊື່ | ຫນ່ວຍງານ | ຄຸນຄ່າ | ຄຸນຄ່າ | ຄຸນຄ່າ | ຄຸນຄ່າ | |
| ແບບ |
| YZ91-4000T | yz91-3600T | yz91-2500T | YZ91-1500T | |
| ກໍາລັງກະບອກຫລັກ | KN | 40000 | 36000 | 25000 | 15000 | |
| ເວລາກາງເວັນ | mm | 500 | 500 | 500 | 500 | |
| ເສັ້ນເລືອດຕັນໃນກະບອກຫລັກ | mm | 400 | 400 | 400 | 400 | |
| ກະບອກສູບ qty. | / | 6 | 6 | 6 | 6 | |
| ຕາຕະລາງ
| LR | mm | 1600 | 1600 | 1400 | 1400 |
| FB | mm | 2600 | 2600 | 2400 | 2400 | |
| ຄວາມໄວເລື່ອນລົງ | ລົງ | mm / s | 80-120 | 80-120 | 80-120 | 80-120 |
| ກັບຄືນ | mm / s | ຮ້ອຍ | ຮ້ອຍ | ຮ້ອຍ | ຮ້ອຍ | |
| ເຮັດວຽກ | mm / s | 10-15 | 10-15 | 10-15 | 10-15 | |
ແມ່ພິມປະຕູແລະຮູບແບບ
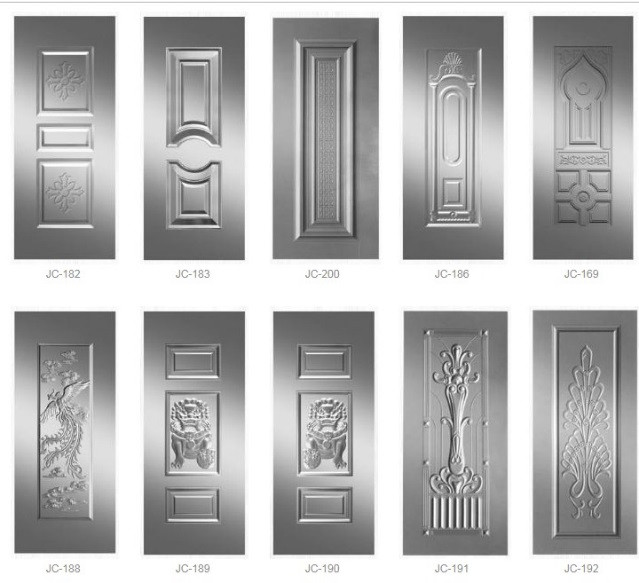 | 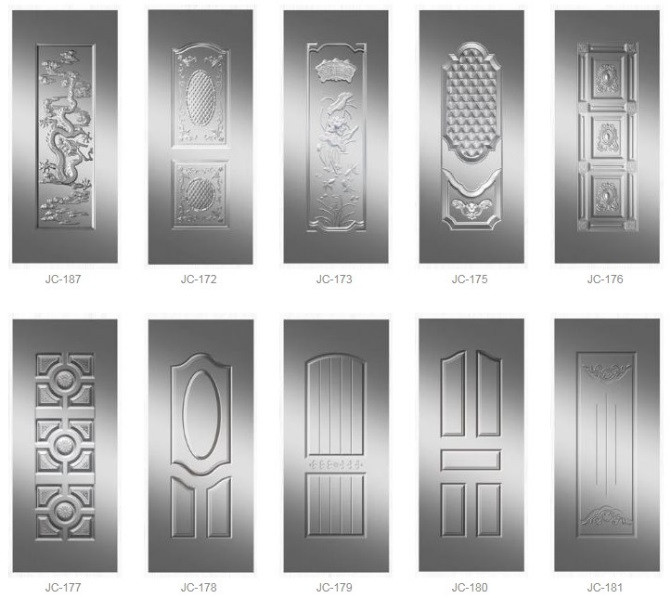 |
ພວກເຮົາສາມາດສະຫນອງຮູບແບບທີ່ແຕກຕ່າງກັນສໍາລັບລູກຄ້າທີ່ຈະເລືອກ, ພວກເຮົາສາມາດສະຫນອງການຜະລິດ. ແມ່ພິມຈະຖືກທົດສອບຢູ່ໃນໂຮງງານຂອງພວກເຮົາ.
| | |
ແມ່ພິມມີ 1 ຊຸດຂອງ Mold Mold ແລະຫລາຍຊຸດຂອງ Mold Cores, ລູກຄ້າສາມາດເຮັດຮູບແບບທີ່ແຕກຕ່າງກັນ, ແລະພຽງແຕ່ຕ້ອງການຊື້ຊຸດ 1 ຊຸດ.
ອຸປະກອນຄວາມປອດໄພ

ຫນ້າທີ່ຮັກສາຄວາມປອດໄພດ້ານຮູບພາບແລະດ້ານຫລັງ

ເລື່ອນລັອກຢູ່ TDC

ສອງປະຕິບັດງານທີ່ດໍາເນີນງານ
ການສະຫນັບສະຫນູນໄຮໂດຼລິກປະກັນໄພ

ການປ້ອງກັນ Overload: ວາວຄວາມປອດໄພ

ປຸກລະດັບຂອງແຫຼວ: ລະດັບນໍ້າມັນ

ຄໍາເຕືອນກ່ຽວກັບອຸນຫະພູມນ້ໍາມັນ

ແຕ່ລະສ່ວນໄຟຟ້າມີການປ້ອງກັນເກີນກໍານົດ

ທ່ອນໄມ້ຄວາມປອດໄພ

ລັອກແກ່ນແມ່ນສະຫນອງໃຫ້ສໍາລັບພາກສ່ວນທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້
ການປະຕິບັດທັງຫມົດຂອງຫນັງສືພິມມີຫນ້າທີ່ interlock ຄວາມປອດໄພ, ຕົວຢ່າງ: ວຽກເຮັດງານທໍາທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້ບໍ່ໄດ້ເຮັດວຽກເວັ້ນເສຍແຕ່ວ່າເບາະກັບຄືນສູ່ຕໍາແຫນ່ງເບື້ອງຕົ້ນ. ເລື່ອນບໍ່ສາມາດກົດໄດ້ເມື່ອວຽກທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້ຖືກກົດ. ເມື່ອປະຕິບັດການຂັດແຍ້ງເກີດຂື້ນ, ການແຈ້ງເຕືອນສະແດງໃຫ້ເຫັນໃນຫນ້າຈໍສໍາພັດແລະສະແດງຄວາມຂັດແຍ້ງ.
ລະບົບຄວບຄຸມໄຟຟ້າ
1. ລະບົບໄຟຟ້າປະກອບດ້ວຍວົງຈອນໄຟຟ້າແລະວົງຈອນຄວບຄຸມ. ວົງຈອນໄຟຟ້າແມ່ນ 380V, 50hz, ເຊິ່ງມີຄວາມຮັບຜິດຊອບຕໍ່ການເລີ່ມຕົ້ນ, ຢຸດແລະປົກປ້ອງແລະປົກປ້ອງມໍເຕີສູບນ້ໍາມັນ. ລະບົບວົງຈອນຄວບຄຸມຮັບຮອງເອົາຜູ້ຄວບຄຸມໂປແກຼມ PLC ໄດ້ປະສົມປະສານກັບຫນ້າຈໍສໍາພັດສໍາຜັດຫນ້າຈໍສໍາຜັດເພື່ອຮັບຮູ້ຮອບວຽນການກະທໍາຂອງເຄື່ອງມື.
2. ສ່ວນປະກອບຄວບຄຸມພະລັງງານຕົ້ນຕໍແມ່ນຕິດຕັ້ງຢູ່ໃນຕູ້ຄວບຄຸມຫລັກ, ແລະຕູ້ຄວບຄຸມຫລັກຖືກວາງຢູ່ເທິງຫນ້າດິນຢູ່ເບື້ອງຂວາຂອງ fuselage. ສ່ວນປະກອບການປະຕິບັດອຸປະກອນແມ່ນເຊື່ອມຕໍ່ໂດຍສາຍອ່ອນ, ຮ້ານຂາຍເຄື່ອງທີ່ເປັນຕູ້ຕົ້ນຕໍແມ່ນປົກກະຕິ, ແລະສາຍຄວບຄຸມແມ່ນເຊື່ອມຕໍ່ໂດຍການບິນ plug-iration ສໍາລັບ overhaul ງ່າຍ.
3. ຫນ້າທີ່ຫຼັກຂອງສ່ວນຄວບຄຸມແມ່ນຄາດວ່າຕົວຄວບຄຸມຕາມເຫດຜົນຂອງໂປແກຼມ PLC. ອີງຕາມຄວາມຕ້ອງການຂອງຂະບວນການ, ຄໍາສັ່ງທີ່ອອກໂດຍອົງປະກອບຄວບຄຸມຫລັກ, ປຸ່ມປ່ຽນແປງແລະຂັບລົດຄວາມກົດດັນແລະອຸປະກອນອື່ນໆ ການກະທໍາ - ກະບອກສູບ, ແລະຫຼັງຈາກນັ້ນສໍາເລັດຂັ້ນຕອນການຜະລິດຂອງເຄື່ອງ.
ເສັ້ນເລືອດຕັນໃນຂອງແຖບເລື່ອນຖືກຄວບຄຸມໂດຍເຊັນເຊີການຍ້າຍຖິ່ນຖານຢ່າງແທ້ຈິງ. ເຊັນເຊີການຍ້າຍຖິ່ນຖານໄດ້ຖືກຈັດຢູ່ໃນສ່ວນເທິງຂອງພາຍໃນຂອງຖັນ. ຈຸດປ່ຽນໃຈເຫລື້ອມໃສແລະຕໍາແຫນ່ງສາມາດກໍານົດໂດຍກົງແລະສະແດງຢູ່ຫນ້າຈໍສໍາພັດ. ນອກຈາກນັ້ນ, ຍັງມີການປ່ຽນຈໍາກັດດ້ານເທິງແລະຕ່ໍາກວ່າສໍາລັບການປ້ອງກັນສອງເທົ່າໃນສະຖານະການທີ່ບໍ່ຄາດຄິດ.
4. ກະດານຄວບຄຸມການປະຕິບັດງານດ້ານການດໍາເນີນງານຂອງອຸປະກອນແມ່ນຈັດຢູ່ໃນຕູ້ຄວບຄຸມຫລັກ, ແລະເຄື່ອງເຈາະສໍາຜັດແລະການປ່ຽນແປງສະຖານະພາບແລະການເລືອກໄຟຟ້າປະກອບດ້ວຍວົງຈອນໄຟຟ້າແລະວົງຈອນຄວບຄຸມ. ວົງຈອນໄຟຟ້າແມ່ນ 380V, 50hz, ເຊິ່ງມີຄວາມຮັບຜິດຊອບຕໍ່ການເລີ່ມຕົ້ນ, ຢຸດແລະປົກປ້ອງແລະປົກປ້ອງມໍເຕີສູບນ້ໍາມັນ. ລະບົບວົງຈອນຄວບຄຸມຮັບຮອງເອົາຜູ້ຄວບຄຸມໂປແກຼມ PLC ໄດ້ປະສົມປະສານກັບຫນ້າຈໍສໍາພັດສໍາຜັດຫນ້າຈໍສໍາຜັດເພື່ອຮັບຮູ້ຮອບວຽນການກະທໍາຂອງເຄື່ອງມື.
ສ່ວນປະກອບຄວບຄຸມພະລັງງານຕົ້ນຕໍແມ່ນຕິດຕັ້ງຢູ່ໃນຕູ້ຄວບຄຸມຫລັກ, ແລະຕູ້ຄວບຄຸມຫລັກຖືກວາງຢູ່ເທິງຫນ້າດິນຢູ່ເບື້ອງຂວາຂອງກະເບື້ອງ; ສ່ວນປະກອບການປະຕິບັດອຸປະກອນແມ່ນເຊື່ອມຕໍ່ໂດຍສາຍອ່ອນ, ຮ້ານຂາຍເຄື່ອງທີ່ເປັນຕູ້ຕົ້ນຕໍແມ່ນປົກກະຕິ, ແລະສາຍຄວບຄຸມແມ່ນເຊື່ອມຕໍ່ໂດຍການບິນ plug-iration ສໍາລັບ overhaul ງ່າຍ.
5. ຫນ້າທີ່ຫຼັກຂອງສ່ວນຄວບຄຸມແມ່ນຄາດວ່າຕົວຄວບຄຸມຕາມເຫດຜົນຂອງ "PLC". ອີງຕາມຄວາມຕ້ອງການຂອງຂະບວນການ, ຄໍາສັ່ງທີ່ອອກໂດຍອົງປະກອບຄວບຄຸມຫລັກ, ປຸ່ມປ່ຽນແປງແລະຂັບລົດຄວາມກົດດັນແລະອຸປະກອນອື່ນໆ ການກະທໍາ - ກະບອກສູບ, ແລະຫຼັງຈາກນັ້ນສໍາເລັດຂັ້ນຕອນການຜະລິດຂອງເຄື່ອງ.
ເສັ້ນເລືອດຕັນໃນຂອງແຖບເລື່ອນຖືກຄວບຄຸມໂດຍເຊັນເຊີການຍ້າຍຖິ່ນຖານຢ່າງແທ້ຈິງ. ເຊັນເຊີການຍ້າຍຖິ່ນຖານໄດ້ຖືກຈັດຢູ່ໃນສ່ວນເທິງຂອງພາຍໃນຂອງຖັນ. ຈຸດປ່ຽນໃຈເຫລື້ອມໃສແລະຕໍາແຫນ່ງສາມາດກໍານົດໂດຍກົງແລະສະແດງຢູ່ຫນ້າຈໍສໍາພັດ. ນອກຈາກນັ້ນ, ຍັງມີການປ່ຽນຈໍາກັດດ້ານເທິງແລະຕ່ໍາກວ່າສໍາລັບການປ້ອງກັນສອງເທົ່າໃນສະຖານະການທີ່ບໍ່ຄາດຄິດ.
6. ກະດານຄວບຄຸມການປະຕິບັດງານດ້ານການປະຕິບັດງານທີ່ເປັນກາງແມ່ນຈັດຢູ່ໃນຕູ້ຄວບຄຸມຫລັກ, ແລະຫນ້າຈໍສະແດງຜົນສໍາພັດທີ່ມີແສງສະຫວ່າງແລະການດໍາເນີນງານທີ່ຈໍາເປັນແລະການປ່ຽນແປງແມ່ນຈັດໃສ່ໃນກະດານ.

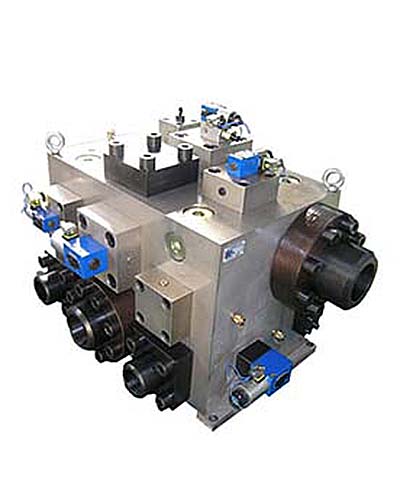
ລະບົບໄຮໂດຼລິກ
ຄຸນນະສົມບັດ:
1. ຖັງນ້ໍາມັນຖືກກໍານົດໄວ້ໃນລະບົບການກັ່ນຕອງເຢັນ≤55℃,ໃຫ້ແນ່ໃຈວ່າເຄື່ອງສາມາດກົດດັນຢ່າງຕໍ່ເນື່ອງໃນ 24 ຊົ່ວໂມງ.
2. ລະບົບໄຮໂດຼລິກຮັບຮອງເອົາລະບົບຄວບຄຸມຄຸນລັກສະນະຄວບຄຸມວາວທີ່ມີຄວາມໄວສູງທີ່ວ່ອງໄວແລະມີປະສິດຕິພາບໃນລະດັບສາຍສົ່ງສູງ.
3. ຖັງນ້ໍາມັນແມ່ນມີເຄື່ອງກອງອາກາດເພື່ອຕິດຕໍ່ກັບພາຍນອກເພື່ອຮັບປະກັນວ່ານ້ໍາມັນໄຮໂດຼລິກບໍ່ມີມົນລະພິດ.
. 4.


ການເຄື່ອນໄຫວດ້ານວິຊາການ
1.ເຄື່ອງກົດຫມາຍສາມາດດໍາເນີນງານໄດ້ໃນ 4 ຮູບແບບ: ການປັບ (ນິ້ວ), ປື້ມຄູ່ມື, ແບບອັດຕະໂນມັດແລະອັດຕະໂນມັດແລະອັດຕະໂນມັດ
2. ແບບຄົງທີ່ແບບຄົງທີ່:ໃນເວລາທີ່ຕໍາແຫນ່ງປະຈຸບັນຂອງແຜ່ນສະໄລ້ແລະເບາະເຂົ້າໄປໃນຕໍາແຫນ່ງ preset, ວຽກງານໃນປະຈຸບັນແມ່ນຢຸດເຊົາ. ຄຸນຄ່າທີ່ຄົງທີ່ໃນໄລຍະຫ່າງຂອງແຜ່ນສະໄລ້ແມ່ນຢູ່ໃນຂອບເຂດຂອງເສັ້ນເລືອດສະຫມອງເຕັມ.
3. ໂຫມດຄວາມດັນຄົງທີ່:ໃນເວລາທີ່ຄວາມກົດດັນໃນປະຈຸບັນຂອງແຜ່ນສະໄລ້ແລະເບາະເຂົ້າໄປໃນຄວາມກົດດັນ preset, ວຽກງານໃນປະຈຸບັນແມ່ນຢຸດເຊົາ.
4. ການປັບຕົວ (INCHING):ປະຕິບັດງານປຸ່ມທີ່ມີປະຕິບັດງານທີ່ສອດຄ້ອງກັນເພື່ອເຮັດສໍາເລັດການກະທໍາທີ່ສອດຄ້ອງກັນ. ກົດປຸ່ມສໍາລັບເວລາດຽວເຮັດໃຫ້ເຄື່ອງຈັກສໍາເລັດການເພີ່ມເຂົ້າໃຊ້ເວລາ. ເຄື່ອງຂ່າວຖືກຢຸດເມື່ອຖືກປ່ອຍຕົວ. ຮູບແບບນີ້ສ່ວນໃຫຍ່ແມ່ນໃຊ້ໃນການປັບເຄື່ອງຈັກແລະທົດແທນການເສຍຊີວິດ.
5. ຄູ່ມື:ຍູ້ແຕ່ລະປຸ່ມຫນ້າທີ່ເຮັດສໍາເລັດການກະທໍາທີ່ກົງກັນ, ແຕ່ລະຄັ້ງຍູ້ໃຫ້ຄົບ 1 ການປະຕິບັດເປັນເວລາ.
6. ເຄິ່ງອັດຕະໂນມັດ:ກົດປຸ່ມ Push-hand ເພື່ອໃຫ້ສໍາເລັດຮອບວຽນດຽວ: ເມື່ອກົດປຸ່ມຄູ່, ເຄື່ອງກົດຫມາຍສໍາເລັດຊຸດຂອງການກະທໍາຂອງຂະບວນການ (ຂະບວນການຂອງວົງຈອນຄວນຈະຖືກກໍານົດໄວ້)
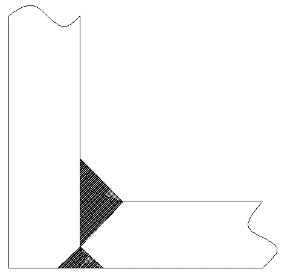
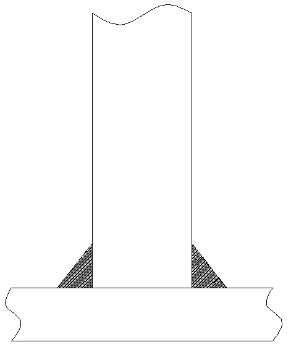
ການເຊື່ອມຕໍ່ເຊື່ອມຕໍ່ຂອງຮ່າງກາຍຫຼັກ
| ຊົງ | ຕ້າງ | ຄົແສ | ເລ່ງຖາມ |
|
| A-Side H = T2 / 3 b-side h = t1 / 3 c≥4l≤3 | A-Side 60 ° B-Side 35 ° 1 / 4≤k≤t | TACK-WELL-WELD ກ່ອນຫນ້ານີ້ກ່ອນອື່ນຫມົດຫຼັງຈາກນັ້ນກັບຄືນໄປບ່ອນທີ່ຖືກສາຍ, ເຄື່ອງສໍາອາງສຸດທ້າຍ |
| baller ball
| ອີງຕາມການແຕ້ມຮູບ | ອີງຕາມການແຕ້ມຮູບ | tack-sided-weld-weld ທໍາອິດຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນການເຊື່ອມຫຼັງ, ຫຼັງຈາກເຄື່ອງສໍາອາງ -Celiet Paretized ຮັກສາຄວາມຮ້ອນ |
 | A-Side H = T / 2 b-side h = t / 3 c≥4l≤3 | A-Side 60 ° B-Side 35 ° 1/4≤k≤10 | TACK-WELL-WELD ກ່ອນຫນ້ານີ້ກ່ອນອື່ນຫມົດຫຼັງຈາກນັ້ນກັບຄືນໄປບ່ອນທີ່ຖືກສາຍ, ເຄື່ອງສໍາອາງສຸດທ້າຍ |
 | V- ຮູບຮ່າງ groove h = t / 3 c≥4l≤3 | 40o≤b≤60o60o 1 / 4≤k≤8 | TACK-WELL-WELD ກ່ອນຫນ້ານີ້ກ່ອນອື່ນຫມົດຫຼັງຈາກນັ້ນກັບຄືນໄປບ່ອນທີ່ຖືກສາຍ, ເຄື່ອງສໍາອາງສຸດທ້າຍ |
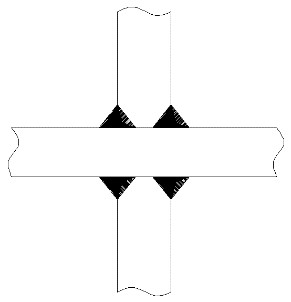 | ຮ່ອງສອງຄັ້ງ h = t / 3 c≥4l≤3 | 40o≤b≤60o60o 1 / 4≤k≤8 | TACK-WELL-WELD ກ່ອນຫນ້ານີ້ກ່ອນອື່ນຫມົດຫຼັງຈາກນັ້ນກັບຄືນໄປບ່ອນທີ່ຖືກສາຍ, ເຄື່ອງສໍາອາງສຸດທ້າຍ |
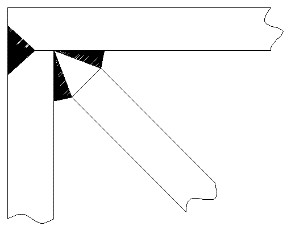 | V- ຮູບຮ່າງ groove h = t / 3 c≥4l≤3 | 40o≤b≤60o60o 1 / 4≤k≤8 | ຮູບຮ່າງຂອງການປຸງແຕ່ງຄ້າຍຄືຂ້າງເທິງ, ການເຊື່ອມໂລຫະທີ່ຄ້ອຍຊັນຫຼັງຈາກຮູບຮ່າງ |
|
| V- ຮູບຮ່າງ groove h = t2 / 3 c≥4l≤3 | B≤60O 1/4≤k≤10 | TACK-WELD ກ່ອນອື່ນຫມົດຫຼັງຈາກນັ້ນກໍ່ກັບມາແລ້ວ, ເຄື່ອງສໍາອາງທີ່ສຸດທ້າຍ |
 ຮ່ວມກັນກົ້ນ
ຮ່ວມກັນກົ້ນ
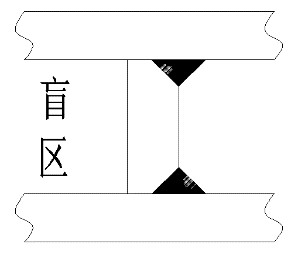 Blindzone
Blindzoneຕາຕະລາງຄວາມອົດທົນຂອງໂຄງສ້າງຂອງຮ່າງກາຍ
| ໂຄງສ້າງ | ລາຍການ | ຄວາມອົດທົນ |
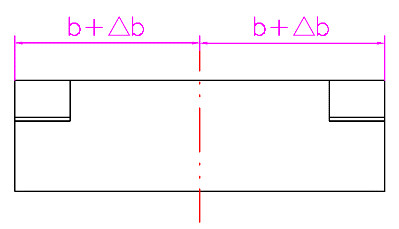 | symmetry ຂອງອົງປະກອບພາຍນອກຂອງໂຄງສ້າງ fuselage(ຄວາມອົດທົນ Spacing△ຂ) | b≤1000△B≤1.5 1000 bມ2000△B≤3.0 |
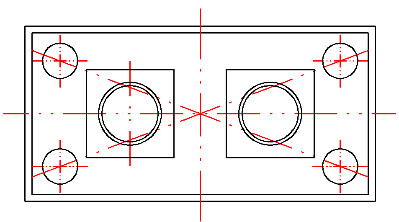 | ຮູບສີ່ຫລ່ຽມວິທີການສີ່ຫລ່ຽມ(ເສັ້ນຂວາງ l ຄວາມທົນທານ△ l) | l≤2000△l≤3.0 2000 Lມ4000△l≤5.0 |
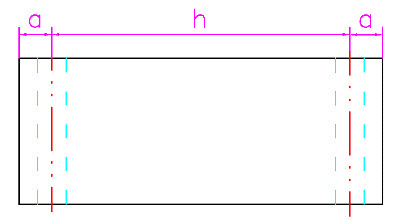 | ຂະຫນານລະຫວ່າງດ້ານເທິງແລະພື້ນດິນຂອງໂຄງສ້າງຖັນ t(inclination ລວມທັງແຜ່ນໃຫຍ່ແລະລຸ່ມ) | h≤4000t≤2.0 4000 hມ8000 t≤5.0 |
 | misalignment ຂອງກະດານເທິງແລະລຸ່ມຂອງໂຄງສ້າງ fuselage | l≤2000t≤2.0 l> 2000 t≤3.0 |
ຄວາມທົນທານຂອງມຸມຂອງການເຊື່ອມໂລຫະ
| ຊັ້ນ | ຂະຫນາດແຂບສັ້ນ mm | |||
| ≤315 | ມ315 ~ 1m | ມ1 ~ 2m | ມ2m | |
| A | ≤1.5 | ≤2.0 | ≤2.5 | ≤3.0 |
| B | ≤2.5 | ≤3.0 | ≤3.5 | ≤4.0 |
| A | ± 20 ' | ± 15 ' | ± 10 ' | _ |
| B | ± 1 ° | ± 45 ' | ± 30 ' | _ |
ຄວາມທົນທານຂອງການເຊື່ອມໂລຫະຮູບຮ່າງແລະຕໍາແຫນ່ງ
| ຊັ້ນ | ຂະຫນາດຂັ້ນພື້ນຖານ mm | |||||
| ≤315 | ມ315 ~ 1 | ມ1 ~ 2m | ມ2 ~ 4m | ມ4 ~ 8m | ມ8m | |
| A | 1.0 | 1.5 | 2.0 | 3.0 | 4.0 | 5.0 |
| B | 2.0 | 3.0 | 4.0 | 6.0 | 8.0 | 10.0 |
| C | 3.0 | 5.0 | 9.0 | 11.0 | 16.0 | 20.0 |





